IQ调制器由三个不同的调制器组成:I、Q臂是强度调制器,P臂是相位调制器。IQ调制器通常应用于相干传输系统。MBC-IQ-OEM(Plugtech)的调制器偏置控制器是专门为IQ调制器设计的,以确保在各种操作环境中保持稳定的操作状态。基于其完全数字化的信号处理方法,该控制器可以提供超稳定的性能。
Part No.: MBC-IQ-OEM
Part No.: MBC-IQ-OEMA
IQ调制器由三个不同的调制器组成:I、Q臂是强度调制器,P臂是相位调制器。IQ调制器通常应用于相干传输系统。MBC-IQ-OEM(Plugtech)的调制器偏置控制器是专门为IQ调制器设计的,以确保在各种操作环境中保持稳定的操作状态。基于其完全数字化的信号处理方法,该控制器可以提供超稳定的性能。
控制器将低频、低振幅抖动信号与偏置电压一起注入调制器。它不断读取调制器的输出,并确定偏置电压的条件和相关误差。随后将根据先前的测量结果施加补偿偏置电压。通过这种方式,确保IQ调制器在适当的偏置电压下工作。
该控制器体积非常紧凑,适用于现代通信系统。
典型参数性能:
|
参数 |
最小值 |
典型值 |
最大值 |
单位 |
|
控制性能 |
||||
|
I, Q臂控制于Min点或Max点 |
||||
|
消光比 |
|
MER1 |
50 |
dB |
|
P臂控制于Quad+(右正交点)或Quad-(左正交点) |
||||
|
Quad点精度 |
−2° |
|
+2° |
degree2 |
|
稳定时间 |
15 |
20 |
25 |
s |
|
电学性能 |
||||
|
正电源电压 |
+14.5 |
+15 |
+15.5 |
V |
|
正电源电流 |
20 |
|
30 |
mA |
|
负电源电压 |
-15.5 |
-15 |
-14.5 |
V |
|
负电源电流 |
8 |
|
15 |
mA |
|
输出电压范围 |
-14.5 |
|
+14.5 |
V |
|
导频幅值 |
|
1%Vπ |
|
V |
|
光学性能 |
||||
|
输入光功率范围3 |
-30 |
|
-8 |
dBm |
|
输入波长范围 |
1100 |
|
1650 |
nm |
1 MER-调制器本身消光比。要实现最大消光比通常是IQ调制器最大消光比。
2 设Vπ表示180°时的偏置电压,以及VP表示在Quad点处的最优化的偏置电压。那么控制器的偏置电压输出将在:VP ±![]() Vπ的范围内。
Vπ的范围内。
3 请注意,输入光功率不是指所选偏置点处的光功率。当偏置电压范围为−Vπ到+Vπ时,调制器可以输出到控制器的最大光功率。

Figure 2.控制器电压适配器
典型性能:
|
|
|
|
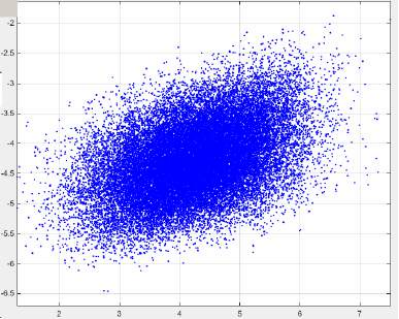
Figure 3.星座(无控制器) |
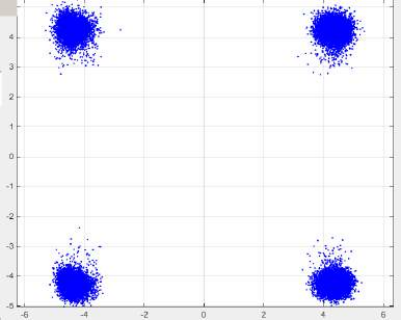
Figure 4. QPSK星座(带控制器) |
|
|
|
|
Figure 5. QPSK-眼图 |
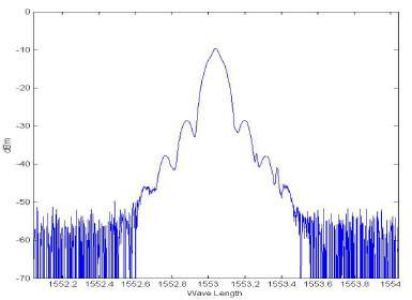
Figure 6. QPSK光谱 |
|
|
|
|
Figure 7. 16-QAM星座图 |
Figure 8. 16-QAM光谱 |
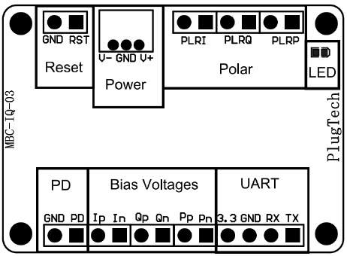
用户接口
|
Group |
操作 |
注释,解释 |
|
Reset |
Insert jumper and pull out after 1 second |
Reset the controller |
|
Power |
Power source for bias controller |
V- connects the negative electrode of the power supply |
|
|
|
V+ connects the positive electrode of the power supply |
|
|
|
Middle port connects with the ground electrode |
|
Polar1 |
PLRI: Insert or pull out the jumper |
no jumper: Null mode; with jumper: Peak mode |
|
|
PLRQ: Insert or pull out the jumper |
no jumper: Null mode; with jumper: Peak mode |
|
|
PLRP: Insert or pull out the jumper |
no jumper: Q+ mode; with jumper: Q- mode |
|
LED |
Constantly on |
Working under stable state |
|
|
On-off or off-on every 0.2s |
Processing data and searching for controlling point |
|
|
On-off or off-on every 1s |
Input optical power is too weak |
|
|
On-off or off-on every 3s |
Input optical power is too strong |
|
PD2 |
Connect with the photodiode |
PD port connects the Cathode of the photodiode |
|
|
|
GND port connects the Anode of the photodiode |
|
Bias Voltages |
In, Ip: Bias voltage for I arm |
Ip: Positive side; In: Negative side or ground |
|
|
Qn, Qp: Bias voltage for Q arm |
Qp: Positive side; Qn: Negative side or ground |
|
|
Pn, Pp: Bias voltage for P arm |
Pp: Positive side; Pn: Negative side or ground |
|
UART |
Operate controller via UART |
3.3: 3.3V reference voltage |
|
|
|
GND: Ground |
|
|
|
RX: Receive of controller |
|
|
|
TX: Transmit of controller |
1 极性取决于系统射频信号。当系统中没有射频信号时,极性应为正。当射频信号的振幅大于某一水平时,极性将从正变为负。此时,零点和峰值点将相互切换。Q+点和Q-点也将相互切换。极坐标开关使用户可以在不改变操作点的情况下直接改变极坐标。
2 在使用控制器光电二极管或使用调制器光电二极管之间只能选择一种。出于两个原因,建议在实验室实验中使用控制器光电二极管。首先,控制器光电二极管保证了质量。其次,调整输入光强度更容易。如果使用调制器的内部光电二极管,请确保光电二极管的输出电流与输入功率严格成比例。
UART指令集
控制器的UART工作在TTL(3.3V)电平,参数如下:57600波特率,8个数据位,无奇偶校验位,1个停止位。
注意:UART控制是偏置控制器的一个附加功能。只有以“A”结尾的型号(例如,MBC-IQ-OEMA)支持UART控制。
|
Description |
Command ID1 |
Data Send1 |
Data Received2 |
Unit |
|
Get optical power3 |
0x65 |
NA |
Current optical power4 |
µW |
|
Get bias voltage |
0x66 |
Arm5 |
Current bias voltage4 |
V |
|
Get Vπ |
0x67 |
Arm5 |
Modulator Vπ 4 |
V |
|
Get polar |
0x68 |
NA |
Current polar of controller6 |
|
|
Get operating status7 |
0x69 |
NA |
Controller operating status8 |
|
|
Set control mode |
0x6A |
Control mode9 |
Status10 |
|
|
Set output voltage11 |
0x6B |
Arm5 + Voltage12 |
Status10 |
|
|
Set polar |
0x6C |
Polar13 |
Status10 |
|
|
System reset14 |
0x6D |
NA |
NA |
|
|
Set Dither Amplitude15 |
0x6F |
Dither Amplitude16 |
Status10 |
|
|
Pause Control17 |
0x73 |
NA |
Status10 |
|
|
Resume Control18 |
0x74 |
NA |
Status10 |
|
1 偏置控制器可以由主设备(例如微处理器)通过UART进行控制。命令ID和数据发送是指主设备发送的数据。每个命令应在7字节的帧中发送,遵循命令ID(1字节)+数据(6字节)的顺序。对于数据字节,应从第一个字节开始填充,未使用的数据字节应为零。
2 接收数据是指主设备接收的数据。对于接收数据,它有一个9字节的帧,遵循命令ID(1字节)+数据(8字节)的顺序。与发送数据类似,接收的数据字节将从第一个字节填充,未使用的数据字节则用零填充。
3 平均功率对应于输入到控制器中的光功率。
4 接收数据是4字节的浮点数字(小字节序)。
5 IQ调制器的对应臂(0x01:I臂; 0x02: Q臂; 0x03: P臂)
6 将接收三个字节。每个字节表示一个臂的极性。字节1是臂I的极性,字节2是臂Q的极性并且字节3是臂P的极性。
7 当控制器处于稳定状态时,控制器接收该命令和发回数据之间可能存在不超过3s的延迟。
8 接收数据为一个字节长。(0x01: 稳定; 0x02: 稳定; 0x03:光过弱; 0x04: 光过强; 0x05: 手动状态)
9 控制模式一个字节 (0x01: 自动模式; 0x02: 手动模式)
10 一个字节。(0x11: 成功; 0x88: 错误)
11 只有当偏置控制器在手动模式下工作时,才能使用设置输出电压功能。由于DAC的准确性和非线性,使用此功能时存在不超过20mV的误差。
12 三个字节。例如,如果输出需要3.215V,则应将电压乘以1000以将该值转换为整数,即3215。然后将3215转换为十六进制格式。3215的十六进制格式为0x0C8F。字节一是最终十六进制结果的上半部分,即0x0C。字节2是下半部分,即0x8F。字节3是电压的符号,0x00表示正极,0x01表示负极。
13 三个字节。这些字节用于表示臂I、Q和P的极性。(0x01: Positive; 0x02: Negative)
14 重置控制器。它将从初始化开始。
15 在臂I和Q上设置抖动幅度。它只能是1%Vπ的倍数,最大抖动幅度为20%。例如,如果臂I的抖动幅度被设置为3。那么臂I上的抖动幅度将为3%。振幅的出厂默认值为1,当用户为控制器设置新值时,它将存储在闪存中,并在控制器打开或重置时自动加载。
16 两个字节。数据的格式是抖动幅度I+抖动幅度Q。每个臂一个字节。
17 此功能将暂停控制器的自动控制。导频(抖动)将停止,臂I、Q和P的偏置电压输出将保持在执行暂停命令时的值。
18 此功能与暂停控制一起使用。当执行暂停控制并且需要自动控制时,执行该命令将恢复自动控制。
环境参数
|
参数 |
最小值 |
典型值 |
最大值 |
单位 |
|
工作温度范围 |
-10 |
|
50 |
◦C |
|
存储温度范围 |
-20 |
|
80 |
◦C |
产品尺寸
|
参数 |
规格 |
|
产品尺寸(W× D× H) |
40mm× 29mm × 12mm |
|
产品重量 |
100g |
典型应用参考
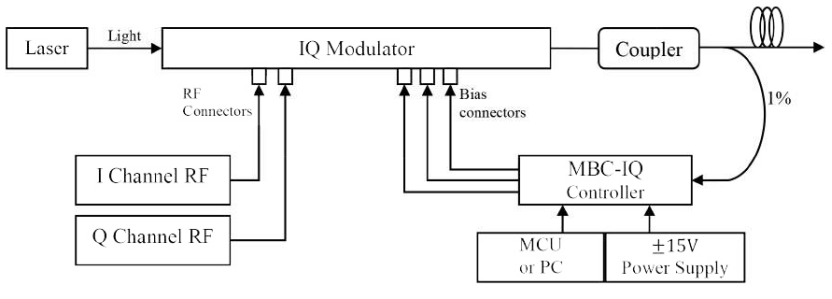
IQ调制器偏置点控制器 快速使用说明:
1、连接1%耦合器端口输入到偏置点控制器的光电二极管。
2、将控制器的偏置电压输出(通过SMA或2.54mm 2针接头)与调制器的偏置端口(I、Q和P)连接。
3、为控制器提供+15V和-15V直流电压(可选电源适配器)。
4、插入跳线并在1秒后拔出,控制器将重新设定并开始工作。
备注1:在按下RESET(重置)按钮之前,请确保整个系统的射频信号处于开启状态。
备注2:如果控制器指示输入光太弱或太强,则应调整输入光强度。调整后,应重新启动控制器,以确保正常运行。
|
|
|
静电敏感设备。请遵守处理注意事项! |